Sensor Fusion
Design notes for multi-sensor estimators, state definitions, and cross-domain observability constraints.
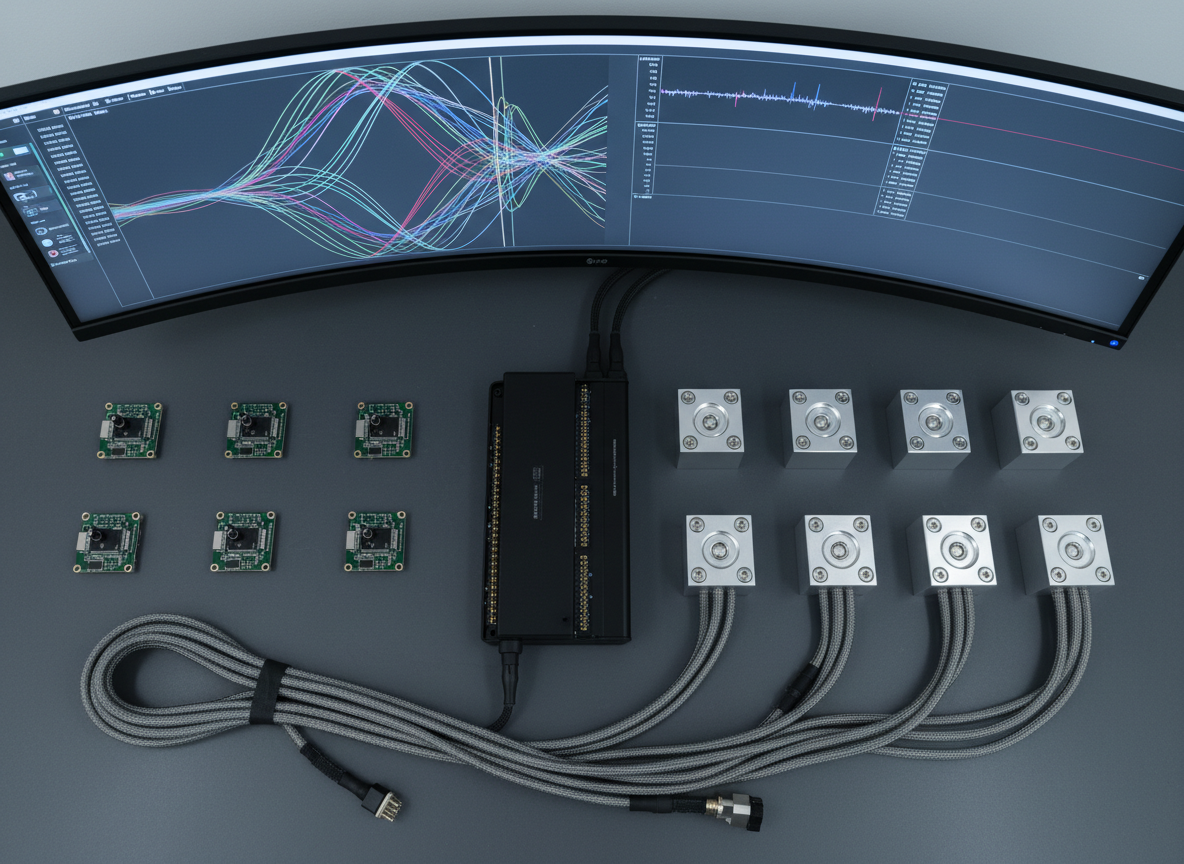

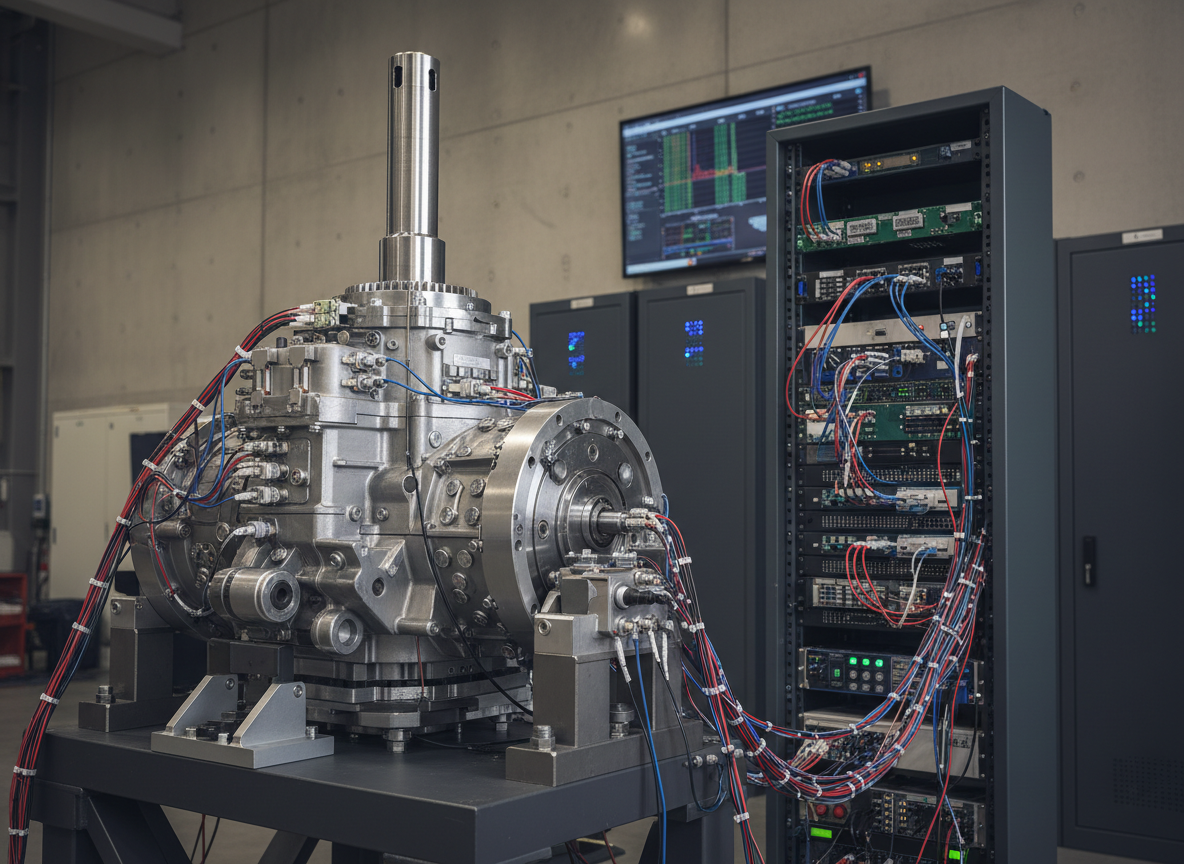
Sensor Fusion Architecture Overview
High-level description of estimator topologies, shared state vectors, observability limits, and trade-offs between centralized, federated, and hybrid fusion for rotorcraft attitude, loads, and vibration monitoring.
Benchmarks
Internal log of fusion benchmarks, tuning sweeps, and filter changes.
Fusion Leads
Aarav Sharma
Mateo García
Zuri Ndlovu
Leila Haddad
Hiroshi Tanaka
Amara Okafor
Soren Jensen
